







Категория: Инструкции
19.02.2016 в 00:22 (18286 Показов)
Запишу в дневник, чтобы не забыть, да и пригодится может кому.
Да, это не полный и исчерпывающий мануал по iNAV, а пример настройки АП под конкретный тип ЛА.
В поисках кандидата легкого, не дорого комплекта АП для мелкого FPV самолета взор упал на давно приобретенную плату CC3D. Поставив ее на самолет и без труда настроив OpenPilot захотелось большего, а именно возврата домой. В результате после изучаения темы всплыли две возможности:
- прошивка Патрика (базируется на baseflight)
- iNAV (базируется на cleanflight)
Имея не очень успешный опыт эксплуатации прошивки Патрика на multiwii, прочитав наискось его тему на fpvlab.com. найдя фразу Патрика же, что его прошивке до iNAV очень далеко, у меня остался только один вариант. А почитав в основном положительные отзывы по системе навигации iNAV вообще развеялись все сомнения.
Получил удовольствие от настройки iNAV, и использования - самолет летает, отлично управляется и летает в стабилизированных режимах, возвращается домой. В RTH имеется возможность изменять высоту возврата в полете при помощи стика РВ.
Начнем (для увеличения изображений правый клик на нем мышей и открыть в новой вкладке).
1. Прошивка iNAV в CC3D.
Ничего необычного в процессе нет.
Качаем скомпилированную прошивку под наш тип платы отсюда https://github.com/iNavFlight/inav/releases
А далее существует куча мануалов как на CC3D залить стороннюю прошивку. Например тут и тут. Единственное отличие, что для прошивки выбираем скачанный файл iNAV.
2. Базовая настройка
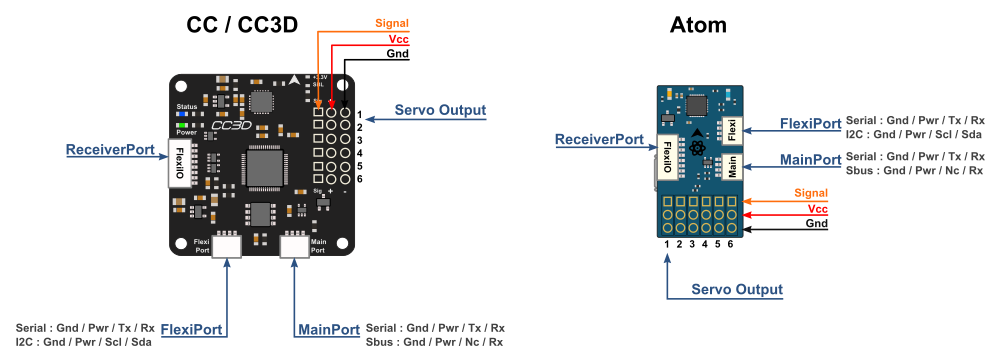
Ориентация платы. Выполняется только из CLI так как GUI не принимает значения более 360, а у iNav единицы углов равны deg*10 то есть для ориентации платы так чтобы USB разъем был слева нужно пойти в терминал (CLI) и выполнить команду
если нужен USB разъем справа, то
Для сохранения изменений сделанных в CLI нужно дать команду save.
Настройка портов. Выполняется на вкладке Ports.
- UART1 оставляем без изменения (по-умолчанию), к нему будет подключено ОСД или FTDI для настройки с компьютера
- UART3 будет занят для GPS. Соответственно и включем эту функцию и выбираем необходимую скорость на порту.
У меня GPS приемник ublox6 со скоростью порта 38400, обновлением 5Гц и выдачей NMEA сообшений.
Как настроить GPS приемник так же немало статей написано, для примера тыц. тыц
Тип ЛА. На вкладке Configuration выбираем тип летательного аппарата - Airplane. Так как у меня классический самолет с хвостовым оперением. Для тех у кого летающее крыло, необходимо выбрать соответствующую опцию.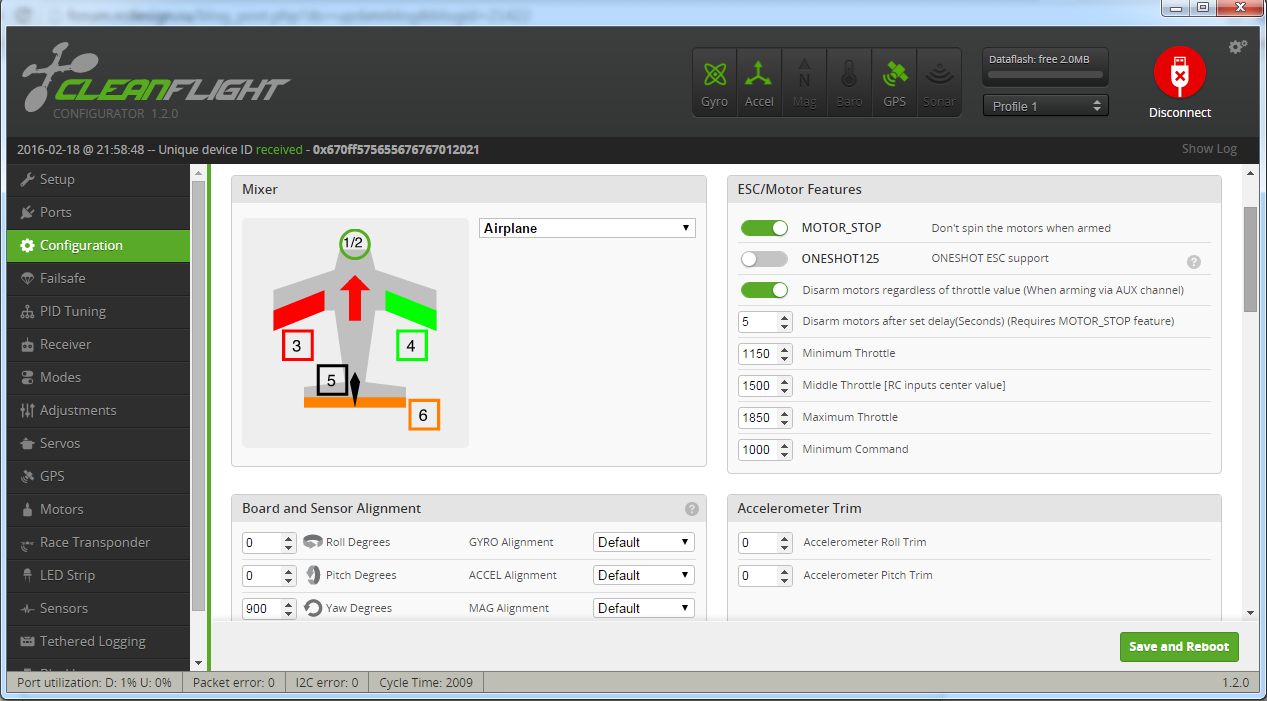
Не обращаем внимания на нумерацию серв/каналов на картинке. Они не очень совпадают с действительностью.
Здесь же, кто не желает вращения мотора при арминге нужно включить MOTOR_STOP. Остальные ESC/Motor features меня полностью устроили.
Для возможности отслеживания полетным контроллером напряжения, тока и RSSI необходим приемник РУ любой, кроме Parallel PWM Receiver. Я подключил свой доработанный для отображения RSSI V8FR-II через PWM->PPM конвертор.
Включим и возмжность работы с GPS, выбрав протокол.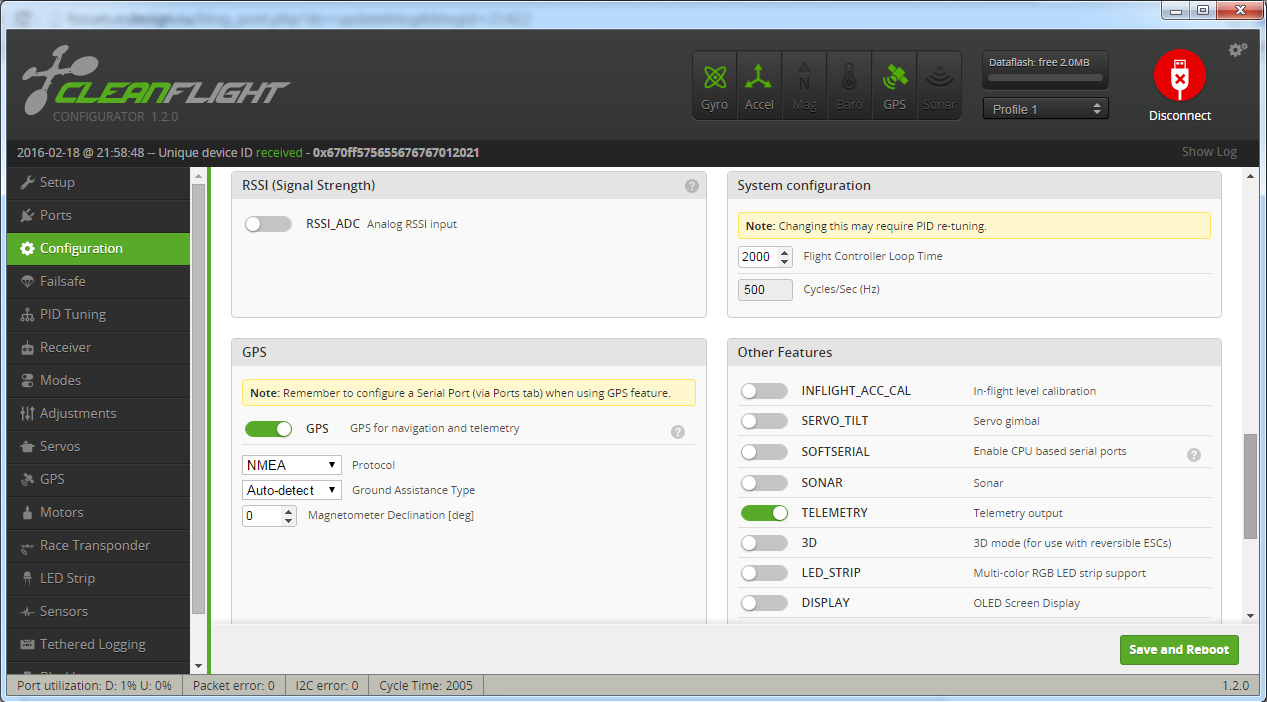
В группе Other Features нужно включить Telemetry и остальное по-желанию. Здесь есть опция SOFTSERIAL, позволяющая использовать пины 4 и 5 входов как программный UART, когда не хватает аппаратных, например для подключения приемников по S-BUS, передачи телеметрии и тп.
Снова заходим в CLI и настраиваем слежение за напряжением батареи:
вместо ххх нужно установить значение, соответствующее делителю напряжения с Ubat до 3.3В. С первого раза навряд ли получится, поэтому методом подбора добиваемся правильного показания вольтметра. Для ускорения процедуры, после каждой смены vbat_scale можно вводить команду status, которая в том числе отобразит и напряжение.
Не стоит настраивать значение vbat_scale в GUI - ничего хорошего из этого не выйдет. Только через CLI.
Настроим слежение за RSSI:
вместо ххх нужно ввести коэффициент масштабирования (1. 255). В мое случае ххх=43. При этом значении RSSI равен 100% когда приемник РУ находится вблизи от передатчика и RSSI равен 0 при выключенном передатчике. Нужно найти такой прог коэффициента RSSI_SCALE при изменении которого на 1 в большую сторону, значение RSSI было бы менее 100%, при включенном передатчике РУ.
Не забываем сохранить параметры командой save в CLI
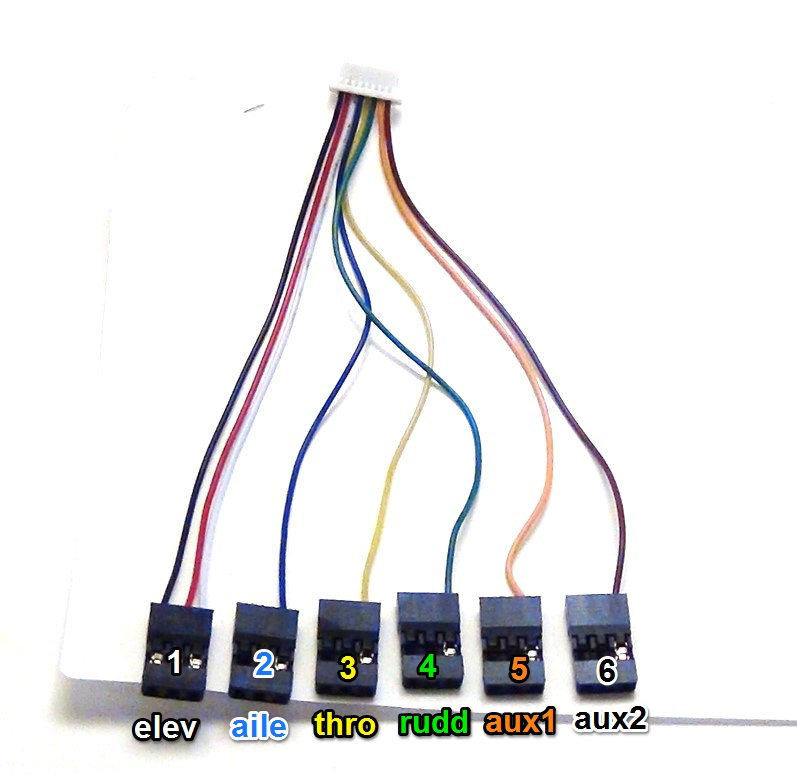
На вкладке Receiver нужно настроить порядок каналов и проверить их соответствие стикам.
На вкладке Modes нужно настроить соответствие режимов полета положению каналов AUX. На AUX я настроил трехпозиционный свитч. С тем как настроено у меня на картинке получается следующее:
- минимальное значение канального импульса - работают одни гиры. Взлет самолета - просто песня. Взял за фюзеляж, нос градусов 10-20 вверх поднял, газу на 80-100%, самолет отпустил. Он под этим углом идет в небо. Без просадок, виляний и пр.
- среднее значение - Angle. Тем, кто любит фпв пилотаж, полюбят режим Horizon 
- максимальное значение - RTH+Angle. Летим домой со стабилизацией.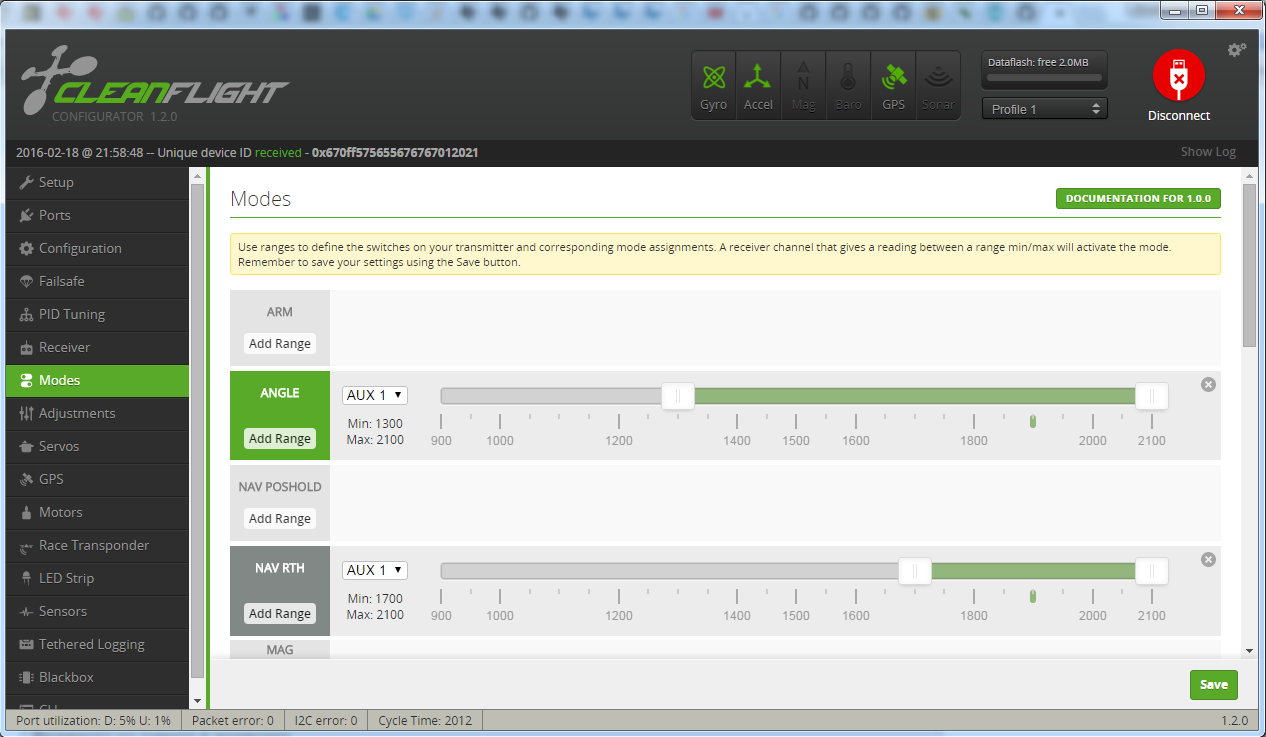
Фейлсейф (закладка Failsafe).
Фейлсейф как по мне, так немного сумбурный. Имеет две фазы. В фазу 1 попадаем, если АП видит проблему с длительностью канала или пропал ППМ с приемника. Тогда АП ставит значения по каналам, настроенные в группе Channel Fallback Settings. Здесь, я себе настроил велицину канального импульса в канале AUX соответствующую режиму RTH. Как только АП попал в фазу 1, он ждет некоторое время (guard time for stage 2 activation), и если связь не восстановилась и АП остается заармленным, то АП переключается в фазу 2. В ней каналы сохраняют свои значения как и в фазе 1, пока они не будут отменены процедурой фазы 2. А именно drop или land.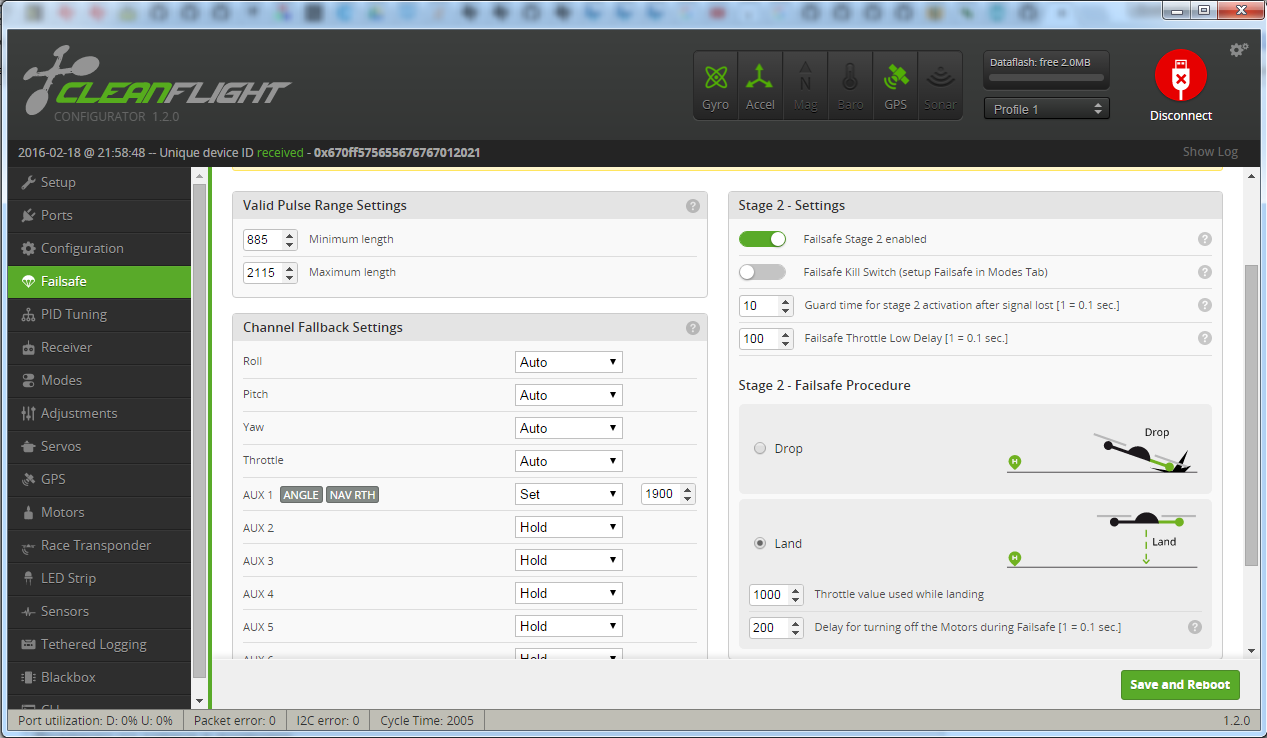
К стати сказать, настройку ФС я невольно проверил. Работает. А дело было так. Одна из первых посадок получилась довольно жесткая - не удивительно, самолет размахом 65см и массой около 600г . Во время этой посадки самолет повел себя так. Ударившись о землю с газом в 0, он резко ожил и дал полный газ, но врезался в кактус, который и остановил аппарат от взлета и набора высоты и кружения в RTH. Это была случайность, которая избавила меня от необходимости стоять и ждать пока сядет акк и самолет рухнет на землю. Короче, при детальном рассмотрении отпал из CC3D приемник от удара при посадке.
После лирического отступления в передатчике настраиваем реверсы каналов по всем правилам (стик РВ на себя - РВ поднимается, стик элеронов влево - левый элерон поднимается, правый опускается, стик РН влево - РН влево)
Далее идем на вкладку Motors, качаем ЛА и смотрим, какие из ползунков шевелятся в зависимости от углов наклона по PITCH и ROLL. Можно запомнить или записать. ROLL - 4,5; PITCH - 3, YAW - 6.
Включаем передатчик, устанавливаем режим Angle или Horizon. Переходим на вкладку Servos.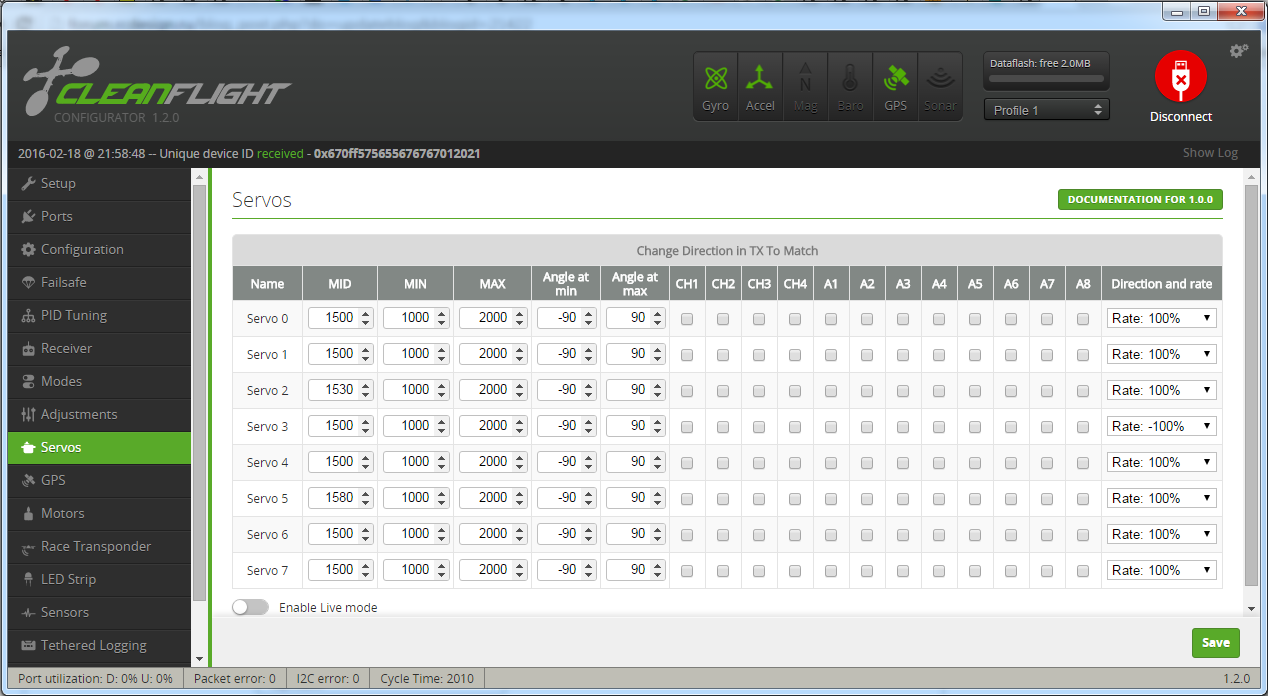
Тут внимательно. Я, например, на неделю позже взлетел на iNAV из-за реверса элеронов, которая обнаружилась на первой секунде полета . На этой вкладке настраиваем конечные и среднюю точки, расходы, а так же реверсы рулей для режимов стабилизации. Нумерация серв на этой вкладке начинается с 0! Для РВ, наклоняем хвост вниз, РВ должен должен опуститься. Если же РВ поднимается, то необходимо установить Rate (самый правый выпадающий список) Servo 2 с отрицательным знаком. Наклоняем левое крыло вниз. Левый элерон должен должен опуститься вниз, а правый подняться вверх. Если что-то не так, то исправляем установкой отрицательных Rate для Servo 3 и Servo 4 (если элероны подключены к одному каналу через Y-кабель, то достаточно поменять настройку только однго из каналов). Далее отводим хвост влево, руль направления должен отклониться влево. Если не так, то устанавливаем отрицательный Rate для Servo 5.
Переходим к OSD. В него необходимо залить прошивку MWOSD. По ссылке присутствует install guide. Там как обычно: прошивка через среду Arduino, запуск конфигуратора, прошивка шрифтов через конфигуратор. Настройка параметров. Скрин параметров: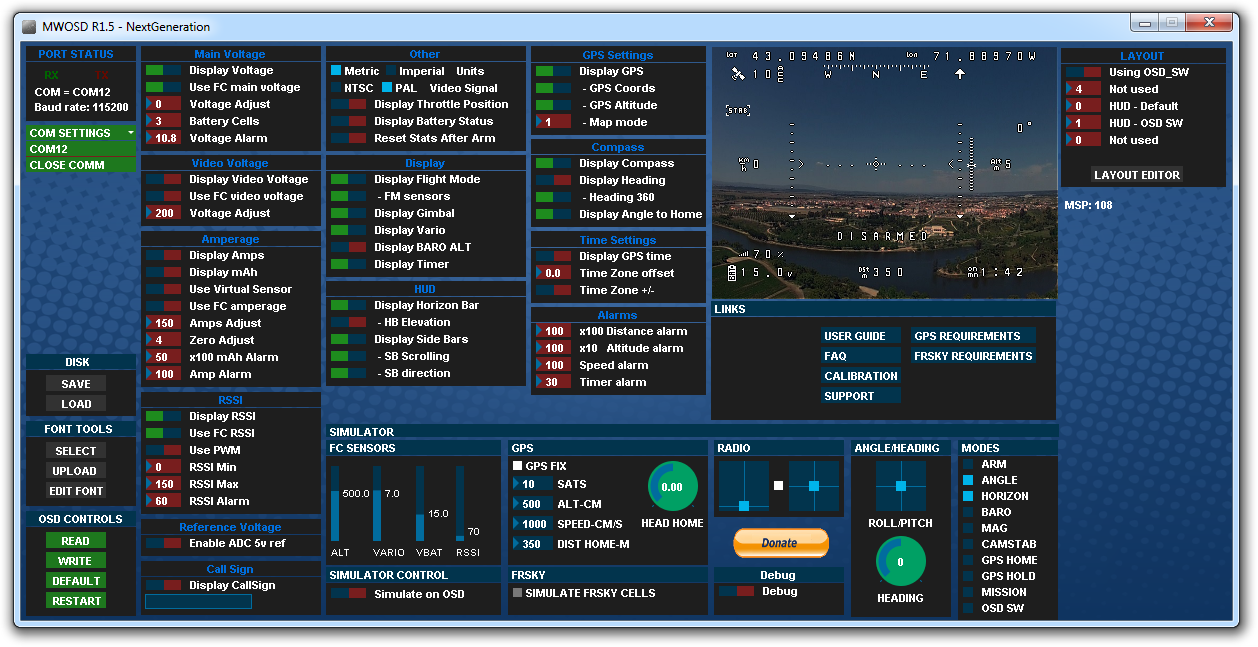
Конечно, до прошивки MWOSD в плату minimOSD ее необходимо настроить. Все изменения в файле Config.h
OSD HARDWARE settings:
AIRCRAFT/INSTALLATION TYPE settings
















Квадрокоптер собран и до полётов уже рукой подать, но надо ещё его натроить.
ДИСКЛЕЙМЕР
Во многих аспектах, данная статья выражает
субъективное мнение автора.
Спорить с ним бесполезно, он упёртый.
Собственно, эту часть, как я писал ранее, надо делать на этапе сборки, пока приёмник ещё не замурован в недрах рамы. Необходимо его забиндить и настроить failsafe. Как это делается можно посмотреть на видео или прочитать ниже.
Биндинг FrSky D4R-II
Настройка Failsafe на FrSky D4R-II
Первое подключение батареи - процесс достаточно ответственный, как спуск судна со стапелей. Если где-то накосячили с проводкой, можно что-нибудь сжечь. Поэтому очень рекомендуется при первом подключении использовать 12-вольтовую автомобильную лампочку. Она подключается последовательно в цепь между батареей и квадрокоптером и служит, как предохранителем, так и индикатором: если она не горит - всё в порядке, если горят ярко - где-то замыкание, но никакие детали не сгорят.

Подключение батареи через автомобильную лампочку
Также очень желательно при подключенной батарее проверить мультиметром раму и лучи. Как я уже писал выше, часто бывает так, что болтик, которым крепится мотор, повреждает изоляцию и замыкает питание одного или нескольких моторов на раму. Последствия бывают самые разные: у кого-то сразу идёт дым из мотора, а у кого-то квадрокоптер летает, но не очень адекватен в управлении.
Теперь непосредственно настройка CC3D. Как уже писалось в прошлой части, программа OpenPilot закрылась, а последний релиз был в мае 2015. На момент сборки квадрокоптера LibrePilot тоже ещё не "зарелизило" (первый релиз вышел в октябре 2015), так что пришлось ставить OpenPilot. Скачать её можно здесь. причём надо брать не последнюю версию, а версию 15.02.02, так как все последующие не поддерживают полётный контроллер CC3D.
Настройка контроллера в этой программе хорошо показана у Юлиана. здесь или здесь. так что я не буду подробно её расписывать, остановлюсь лишь на некоторых моментах.
При прохождении "Мастера настройки" я застопорился на калибровке регуляторов. Дальнейшее копание показало, что во время пайки я немного перегрел плату ПК и у неё отошёл сигнальный контакт регулятора первого мотора. Неприятность, но не проблема: я переназначил первый мотор на пятый канал. Пришлось полностью разобрать квадрокоптер и заново припаять провода к ПК. Тогда же я развернул ПК на 90 градусов.
"Мастера настройки" мне теперь было не пройти (на этапе калибровки регуляторов он "искал" первый регулятор на первом канале), так что пришлось всё настраивать вручную.
PID и кривую газа я оставил дефолтными. Это очень индивидуальные параметры: PID учитывают массу, развесовку и технические параметры модели, а кривая газа - личные предпочтения пилота. Настраивать их надо непосредственно под себя. С кривой газа есть такой нюанс, что в любом случае, точка максимального газа (самая правая) должна стоять на 90% (так она и стоит в настройках по умолчанию). Дело в том, что по факту все моторы и все регуляторы на квадрокоптере чуть-чуть разные и при идентичном напряжении выдают немного разное количество оборотов. ПК нивелирует это, где-то чуть повышая обороты, где-то чуть понижая их. Если поставить точку максимального газа на 100%, при полном газе повышать обороты будет некуда и квадрокоптер может уводить в какую-либо сторону. Если же установить эту точно на 90%, "пространство для манёвра" будет всегда.
На этом я завершаю вторую часть этой статьи. Квадрокоптер собран и он летает, но надо понимать, что он изначально расчитывался под FPV, а так как этого оборудования пока не установлено, в нынешнем состоянии развесовка квадрокоптера далека от идеальной. Собственно, в третьей части я расскажу об установке FPV и только после этого можно будет затронуть тему настройки PID. Кстати, вес квадрокопрера составил около 360 грамм без батареи. Ниже немного фото.






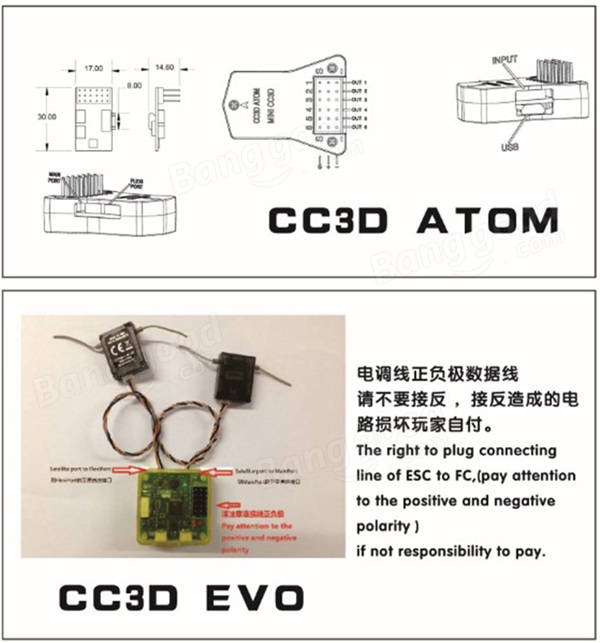
Этот 32х битный полетный контроллер для мультикоптеров имеет малые размеры и вес.
На данный момент комментариев нет.
CC3D Openpilot Open Source Flight Controller 32х битный полетный контроллер для моделей мультикоптеров, малые размеры и вес сделали данную модель популярной среди любителей микрокоптеров, но модель предполагает установку и на другие платформы в том числе самолеты и схемы типа крыло
Особенности Полетного контроллера CC3D Atom:
Мощный 32-битный микроконтроллер STM32 (128 кБ Flash памяти и 20 кБ оперативной памяти)
3-осевые высокопроизводительные MEMS гироскопы и 3-осевой MEMS акселерометр
Компактная (36 × 36 мм) 4-слойная печатная плата обеспечивает максимальную защиту от помех и высокую производительность
Поддержка Windows, Mac и Linux
Поддержка USB и отсутствие драйверов делают данный контроллер легким в эксплуатации
Поддержка сателитов Spektrum
Поддержка системы Futaba S/BUS
Инновационная технология Flexi-port
4 МБ энергонезависимой памяти EEPROM для хранения настроек
3-осевые гироскопы и 3-осевой акселерометр MPU-6000
Поддержка основных радиовходов: 6 каналов PWM, PPM, Spektrum/JR DSM2, DSMJ, DSMX, приемники Futaba S.Bus
Поддержка нескольких приемников одновременно
Функции ReceiverPort (настраиваемые): 6 входных каналов PWM или PPM, 4 выходных канала PWM
Функции MainPort (настраиваемые): телеметрия (по умолчанию), GPS, S.BUS, сателиты Spektrum/JR
Функции FlexiPort (настраиваемые): телеметрия, GPS, сателиты Spektrum/JR, периферийные устройства I2C (в разработке)
10 выходов PWM для сервоприводов или ESC либо для стабилизации камеры
Стабилизация камеры: поддержка 3-осевых подвесов с поддержкой стабилизации и ручного управления
Дополнительный фильтр, работающий на частоте 500 Гц
Технические характеристики Полетного контроллера CC3D Atom:
Размеры платы: 30*17 мм 22*38*12 в боксе
Вес платы: 4,7 гр. (без пластикового кейса и соединительных проводов)
Комплект Полетного контроллера CC3D Atom:
Полетный контроллер в пластиковом кейсе
Комплект соединительных проводов
FPV комплекты | OSD - телеметрия | Антенны и переходники | Датчики контроля | Двигатели и регуляторы хода | Карбон и моторамы | Курсовые видеокамеры | Передатчики видеоизображения | Пропеллеры и винты для мультикоптеров | Рамы для квадрокоптеров и мультироторных систем | Распределители питания и проводка | Шасси и подвесы
SKU 10081 Цена: 18.29 Цена в UAH: 498грн Нет в наличии
Сообщить когда появится
Вы можете купить данный товар с доставкой по всей Украине
OpenPilot CC3D Atom Mini - это микро версия полетного контроллера CC3D, которая имеет те же самые возможности, но меньший вес и размер. Настраивается контроллер через программу управления OpenPilot. Чаще всего используют для быстрых FPV полетов и гонок на квадрокоптерах 250-го класса, ZMR250, QAV250.
В комплекте уже идет антивибрационная площадка и пластиковый крепеж для антенн, который разводит две антенны приемника под нужным углом в 45 градусов.
Характеристики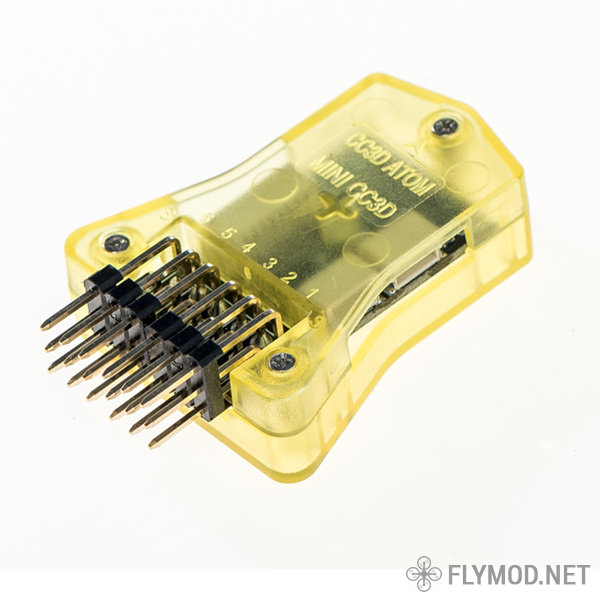



Необходимо быть зарегистрированным или авторизованным пользователям чтобы оставлять сообщения.
Регистрация








