Категория: Инструкции
When handling micromaster 440 inverters, classified as general, transport &. Failure to follow the instructions contained in this manual can result in loss of. We would like to show you a description here but the site wont allow us. Вотсапп скачать на андроид
Connect p0820 ( p0821 if required) to the dds changeover source ( e. Micromaster 440 operating instructions ( compact) 6 commissioning. Designation function1 output 10 v2 output 0 v3 adc1 analog input 1 ( )4 adc1- analog input 1 ( -)5 din1 digital input 16 din2 digital input 27 din3 digital input 38 din4 digital input 49 isolated output 24 v max
Micromaster 440 инструкция
Micromaster 440 - siemensDownload power supply users manual of siemens micromaster 440 for free. Siemens inverters operating instructions. Prolong the service life of your micromaster 440 inverter and the equipment. The instructions contained in this manual can result in loss of life, severe. Troubleshooting specific for the micromaster 440. Instruction manual for details. Basic information required to install and set up your micromaster 440 for. 3 functions issue 1006micromaster 440 operating instructions52 6se6400-5aw00-0bp0monitoring parametersthese can siemens. When handling micromaster 440 inverters, classified as general, transport &. Failure to follow the instructions contained in this manual can result in loss of.
Micromaster 440 инструкция - Siemens micromaster 440 operating instructions manualControl terminals terminal designation function 1 output 10 v 2 output 0 v 3 adc1 analog input 1 ( ) 4 adc1 analog input 1 ( ) 5 din1 digital input 1 6 din2 digital input 2 7 din3 digital inp 2 electrical installation issue 1006 micromaster 440 22 operating instructions ( compact) 2. To do this. the motor parameters set in the factory ( p0304. p0305. p0307. p0310), that correspond to a 4-pole 1la7 siemens motor. must match the rated data of the connected motor ( refer to the rating plate)
Micromaster 440 operating instructions - home micromaster 440 инструкция










Преобразователи частоты Siemens Micromaster 440, оснащенные высокоэффективным бездатчиковым способом регулирования по векторному типу, - Vector Control Sensorless, - успешно применяются для изменения/регулирования показателей скорости вращения низковольтных электродвигателей переменного тока (нагрузка постоянного/вентиляторная). Также преобразователи этого класса рационально использовать в процессах с высокой динамикой и повышенным набором требований к стартовому моменту и перегрузке. Мощностной диапазон моделей: от 120Вт (в условиях однофазного входа) и до 200кВт (трехфазный вход). Устройства оснащены системой управления микропроцессорного уровня и задействуют самые современные и не единожды тестированные и проверенные технологии с IGBT модулями-транзисторами, что расшифровывается как Insulated Gate Bipolar Transistor (перевод - биполярный транзистор+изолированный затвор). Специфический и нестандартный способ ШИМ (широтно-импульсная модуляция) с опцией выбора частоты коммутации, предусматривает возможность минимизации шумового эффекта при работе электродвигателя.
Каталог на русском языке
Список параметров ММ 440 на английском языке
Руководство по эксплуатации и список параметров на русском языке
Техническая информация по фильтрам ЭМС на английском языке
Габаритные размеры (английский)
Подключение тормозного резистора
Активация и настройка ПИД регулятора на английском языке
Подключение модуля энкодера на английском языке
про формовку знаю. причем Siemens как всегда "горе от ума" в разных источниках пишет по разному.
в руководстве по Micromaster 440 написано что для типоразмеров FX и GX, 250kW это GX (максимальный типоразмер) - формовку делать 30 min, 85% input voltage (не зависимо от срока хранения)
а на суппорте если более 3 лет то 8 часов, 2 часа - 25%, 2 - 50%, 2 - 75%, 2 - 100%.
какой способ правильный?
на суппорте упоминается способ формовки через резисторы без ЛАТРа, можно ли делать так?
какой мощности нужен латр? например для формовки Micromaster 440 на 250kW?
если нет ЛАТРа можно ли формовку сделать через резисторы?
но это с подачей силового напряжения, а есть ли методика проверки без подачи силового напряжения.
вариант с ЛАТРом отличный. какие есть еще варианты?
на суппорте только про конденсаторы.
How to preventive maintenance or check each parts of Micromaster 440?
https://support.industry.siemens.com/tf. ageSize=10
но можно и не через ЛАТР, а через резисторы
MICROMASTER, SINAMICS V20/G110/G120/G120C/G120P: Forming the DC link capacitors.
Procedure with resistors (lamps):
The DC link capacitors are formed by connecting the supply voltage to the line supply connections of the drive unit for at least 60 min. This must be done at room temperature and without any load connected to the unit. A series resistance must be connected-up in all of the three line supply phases:
a) 400V drive units: A resistor of 1k/100W (e.g. GWK150J1001KLX000, Vishay Company should be used). As an alternative, 100W incandescent lamps can be used for line supply voltages of up to 400V. When using the incandescent lamps, then during the forming process, these will either go out or will be lit very weakly.
b) 690V drive units: A resistance of 1k/160W (e.g. GWK200J1001KLX000, Vishay Company) should be used.
Можно и через резисторы.
Проблема-то в том, что даже если бы конденсаторы были пробиты накоротко - всё равно фазы не звонились бы через 4 Ома, ведь перед ними стоит ещё и выпрямитель. Откуда эти Омы - вот вопрос.
Вот я и думаю, что если осторожненько с нуля через амерметр начать подавать напряжение - может, выяснится, в чем дело, без пиротехнических эффектов и тяжких финансовых потерь.
Иначе - только разбирать, рассоединять соединения и вызванивать/выискивать источник замыкания. Но для этого нужно всё-таки представлять себе устройство частотника, хотя бы в общих чертах.
В свое время на рабочем месте собрал стенд - три фазы подавались к испытательной розетке (клеммнику) через лампы накаливания (то ли 250, то ли 400 Вт, уже не помню).
Выручал он меня неоднократно.

глаза боятся - руки делают.
пока я тут общался, задал еще вопрос на суппорте. коллега уже включил частотник, без формовки без ничего. и micromaster работает насос включали все нормально.
А кто-ж сказал, что он не должен работать? Если все в порядке, то просто обязан, даже если конденсаторы и были не в порядке, сформуются естественным путем в процессе работы. Коллегам просто повезло.
Кто сейчас на конференцииСейчас этот форум просматривают: нет зарегистрированных пользователей и 0 гостей

Преобразователи частоты MICROMASTER 440 могут использоваться для решения сложных задач, требующих применения приводов с
глубокими диапазонами регулирования. Гибкость и модульность конструкции преобразователей обеспечивает применение в различных отраслях промышленности. Лучше всего они подходят для использования на грузоподъемных механизмах, в пищевой промышленности, в линиях по разливу напитков, в упаковочной и текстильной промышленности. Они особенно отличается высокой производительностью и гибкостью применения. Преобразователи выпускается для широкого диапазона промышленного напряжения, что позволяет использовать его в любой части света.
- легкая инсталляция преобразователя
- особо гибкая конфигурация преобразователя благодаря модульной конструкции
- 6 свободно параметрируемых, потенциально развязанных цифровых входа
- 2 аналоговых входа (от 0 до 10 V, 0 mA до 20 mA), могут по выбору быть использованы в качестве 7-го и 8-го дискретного входа
- 2 параметрируемых аналоговых выхода (от 0 mA до 20 mA)
- 3 параметрируемыx релейных выхода (DC 30V/5A, омическая нагрузка, AC 250V/2A,
индуктивная нагрузка)
- блочное исполнение
- эксплуатационная температура -10 ºС … +50 ºС
- миниатюрный корпус благодаря высокой удельной мощности
- легкое подключение вводных кабелей и кабелей электродвигателей для оптимальной монтажной совместимости
- съемная панель оператора
- управляющая клеммная колодка без винтов
- современная технология IGBT модулей
- дискретно микропроцессорное управление
- высокоточное векторное управление
- управление прямым током (FCC) для лучших динамических характеристик и
оптимального управления электродвигателем
- U/f-управление линейное
- U/f-управление квадратичное
- параметрируемая кривая зависимости U/f
- управление моментом
- постоянный момент, СТ
- переменный момент, VT
- режим низкого потребления энергии
- «подхват на ходу»
- компенсация скольжения
- автоматический повторный запуск припропадании сети или нарушениях режима
высококачественный PID контроллер (с автонастройкой) для простого управления
производственными процессами
- регулируемое время разгона и торможения в пределах 0-650 секунд
- сглаживание кривой пуска
- быстродействующее токоограничение (FCL) для безаварийной работы
- быстродействующий, репродуцируемый опрос цифровых входов
- точный ввод заданного значения благодаря дести-битному аналоговому входу
- комбинированный тормоз для контролируемого быстрого останова
- частоты пропускания против резонансных колебанеий
- демонтируемый “Y”-конденсатор для использования в сети IT встроенный тормозной
резистор
- бесшумная работа электродвигателя благодаря высокой частоте несущей ШИМ
- электронная защита электродвигателя и частотного преобразователя
- перегрузочная способность 50% от расчётного выходного тока в течение 60 сек
каждые 5 минут и 100% в течение 3 сек каждые 5 минут
- защита от перенапряжения и пониженного напряжения
-защита от перегрева преобразователя
-защита двигателя при помощи подключения терморезистора через цифровой вход
- защитное заземление
- защита от короткого замыкания
- тепловая защита двигателя i2t
- защита блокировки двигателя
- защита от изменения параметров
- защита от опрокидывани я
Итак, используя поисковую систему Яндекс( как истинные патриоты) находим такую информацию:
1. ВВОД ПАРАМЕТРОВ ДВИГАТЕЛЯ И ЕГО ИДЕНТИФИКАЦИЯ
Перед началом работы внимательно изучить инструкцию по
эксплуатации преобразователя частоты.
1 Этап. Сброс на заводские установки.
Если в ходе настройки преобразователя частоты (далее – ПЧ ) были введены ошибочные значения параметров и затруднителен их поиск и исправление. то рекомендуется осуществить сброс всех параметров на заводские настройки и повторить цикл параметрирования снова.
Для этой процедуры используются след. параметры:
1. Р0003 =4 - уровень доступа к параметрам (экспертный уровень). При этом открывается доступ ко всем параметрам ПЧ
2. Р0010=30 - разрешение на заводские настройки
3. Р0970=1 - старт процесса сброса
2 Этап. Введение параметров двигателя. (Быстрый ввод в эксплуатацию)
Р0003 = 4 - уровень доступа к параметрам
Р0004 = 0 - фильтр параметров (все параметры)
Р0010 = 1 - быстрое параметрирование (начало процесса тестирования двигателя)
Р0100 = 0
Р0205 = 0 - работа с постоянным моментом
Р0300 = 1 - асинхронный двигатель, (АД)
Р0304 = 380 - номинальное напряжение двигателя. В
Р0305 = … - номинальный ток двигателя, А
Р0307 = … - номинальная мощность двигателя, кВт
Р0308 = … - cos? двигателя
Р0310 = 50. номинальная частота, Гц
Р0311 = … - Номинальная асинхронная скорость двигателя, об./мин ( с шильдика двигателя)
Р0320 = 0 - ток намагничивания (определяется автоматически в ходе тестирования)
Р0335 = 0 - самоохлаждение двигателя
Р0500 = 0 - тип нагрузки (постоянный момент)
Р0640 =170 - перегрузка двигателя по току (рекомендуется 150 -180), %
Р0700 =1 - выбор источника управляющих сигналов (1-пульт управления, 2- внешними
сигналами. После тестирования выставить 2)
Р1000 =3 - выбор источников задания частоты («3» - фиксированные частоты)
Р1080 =0 - минимальная частота, Гц
Р1082 =50 - максимальная частота, Гц
Р1120 = 2.1 - время разгона, с
Р1121 = 1.2 - время торможения, с
Р1135 = 0.4 - время аварийного останова, с
Р1300 = 20 - выбор режима управления - векторное управление без обр. связи
Р1500 = 0 - выбор источника задания момента
Р1910 = 1 - определение параметров двигателя ( при этом появляется код предупре-
ждения А0541. что при последующей подаче команды «Пуск» начнется
измерение параметров двигателя
P1960 = 0 - оптимизация контроля скорости
Р3900 = 3 - Завершение быстрого ввода с расчетом двигателя (появится сигнал занятости
расчетами)
-Подождать. пока не закончится предварительный расчет
-Нажать кнопку Пуск (или подать внешнюю команду на пуск). При этом должны быть слышны характерные звуки в тестируемом двигателе.
-Подождать. пока закончится тестирование двигателя. По окончании тестирования дисплей будет отображать последний параметр.
-Приступить к редактированию остальных параметров.
Внимание. 1. Во время тестирования двигатель должен быть подключен к выходу частотного преобразователя. Если двигатель подключен через дополнительный контактор, то на время тестирования контактор нужно включить принудительно (или на время его зашунтировать).
2. На время тестирования отключить шкаф управления или цепи управления тормозом лебедки.
3. На время тестирования временно выставить. Р700 =1 (управление с пульта). После тестирования выставить в «2» (терминал)!
4. Вернуть все временные изменения в цепях управления в исходное состояние
5. Переход к разрядам чисел при редактировании параметров осуществляется нажатием на клавишу « Fn » на пульте управления.
Думаю это вам поможет разобраться
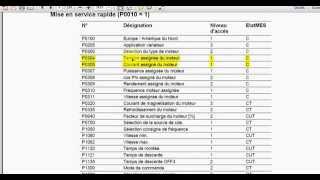
Список основных параметров для редактирования
Р003 =3 - уровень доступа к параметрам
Р004 =0 - фильтр параметров (все параметры)
Р100=0 - европейская система единиц (кВт, 50 Гц)
Р205=0 - режим использования ПЧ ( постоянный момент)
Р290=1 - реакция ПЧ на перегрузки (выход в аварию -отключение)
Р295=20 - задержка отключения вентилятора охлаждения
Р300=1 - тип двигателя (асинхронный)
Р304=380 (ном. напряжение двигателя )
Р305=…. (ном. ток двигателя, А)
Р306=…. (ном. мощность двигателя, кВт)
Р308=…. ( cos двигателя )
Р310=50 ( ном. частота двигателя )
Р311=…. (Номинальная асинхронная скорость двигателя, об./мин)
Р335=0 - охлаждение двигателя (самоохлаждение)
Р500=0 - область применения ПЧ (привод с постоянным моментом)
Р610=2 - реакция на перегрев двигателя (предупреждение и выход в аварию – F0011)
Р640=170 - допустимая перегрузка двигателя по току (рекомендуется 150 -180), %
Р700=2 - выбор источника управляющих сигналов - терминал (при тестировании двигателя
временно выставить =1)
Р701=1 – функция входа №1 (направление вверх)
Р702=2 – функция входа №2 (направление вниз)
Р703=15 – функция входа №3 (фиксированная частота большой скорости)
Р704=99 – функция входа №4 (BICO-функции - расширенные функции с возможностью перехода
на 2-й набор времени разгона-торможения и фиксированная частота малой скорости)
Р705=0 – вход не используется
Р706=4 функция быстрого аварийного останова. На этот вход подано напряжение +24 в, когда нет обрыва цепи безопасности или нет условий для аварийного останова привода. При возникновении аварийной ситуации сигнал должен немедленно сниматься, тем самым формируя аварийный останов привода.
Р707=0 – вход не используется
Р708=0 – вход не используется
Р724=2 – время фильтрации входных сигналов (8.2 мс)
Р731=52:3 – функция выхода №1 (готовность привода и отсутствие аварий)
Р732=2811:0 – функция выхода №2 (синхронизация работы тормоза – выход внутреннего
контроллера - анализатора частоты и тока)
Р1000=3 – источник задания частот (фиксированные частоты)
Р1001=0 - задание частоты по входу №1 – нет
Р1002=0 - задание частоты по входу №2 – нет
Р1003=47 (задание частоты по входу №3 -частота для большой скорости. )
Р1004=9 (задание частоты по входу №4 -частота для малой скорости. )
Р1005…. по Р1015=0
Р1023=722.3 (BICO-задание частоты по входу №3)
Р1031=0 (сохранение частоты в панели управления –нет)
Р1060= 2.1 (второе время разгона),сек
Р1061=1.3 (второе время торможения - при переходе на малую скорость),сек
Р1080=0 – мин. частота
Р1082=50 –максимальная частота
Р1120= 2.1 (время разгона)
Р1121=1,2 (время торможения -на шунте ТО)
Р1124=722.3 (активация 2-го времени разгона-торможения по входу №3)
Р1130 0,5 (1-й участок округления при разгоне), с
Р1131 0,5 (2-й участок округления при разгоне), с
Р1132 0.5 (1-й участок округления при торможении), с
Р1133 0.4 (2-й участок округления при торможении), с
Р1134=1 (округление при обрыве задания –нет)
Р1135=0.4 (время торможения при аварийном останове),с
Р1210=1 (автоматический перезапуск –нет)
Р1215=1 (активация удержания током)
Р1216=0.3 (время удержания перед стартом),с
Р1217=1 (время удержания перед наложением тормоза),с
Р1237=5 (уровень динамического торможения -100%)
Р1240=0 (дезактивация контроллера звена постоянного тока)
Р1300=20 (векторный режим работы)
Р1470=7 ( пропорциональный коэффициент регулятора скорости – рекомендованные значения
лежат в области 5.5 - 8. С увеличением этого коэффициента возрастает скорость реакции
привода на неоднородности момента на валу двигателя, но при этом могут возникать
возбуждения привода в определенных ситуациях. Оптимальное значение коэффициента
определяется экспериментально-по удовлетворительной работе привода в динамических
процессах)
Р1472=176 ( интегральный коэффициент регулятора скорости- рекомендованные значения лежат в
области 80 – 300. оказывает сглаживающее воздействие на регулирование скорости.
Обычно с увеличением пропорциональной части уменьшают интегральную часть.)
Р1570=110 ( коэффициент потокосцепления)
Р1610=200 (увеличение момента на сверхнизких частотах)
Р1611=150 (увеличение момента при разгоне)
Р1755=3 (частота перехода управления на векторную модель)
Р1756=50 (гистерезис частоты перехода на векторную модель)
Р1758=100 (минимальное время перехода с токовой модели на векторную модель)
Р1800=6 ( ШИМ-частота работы транзисторных ключей ПЧ)
P2106=2829:0 (источник формирования искусственной аварии-выход логического элемента
NOT1)
Р2150=0 (гистерезис контроля частоты)
Р2155 =0.03 (контрольная частота №1)
Р2156=0 (задержка после определения контрольной частоты)
Р2157=0.03 (контрольная частота №2)
Р2158=0 (задержка после определения контрольной частоты)
Р2159=0.03 (контрольная частота №3)
Р2160=0 (задержка после определения контрольной частоты)
P2170=5 (контрольный уровень тока, в % от номинального тока двигателя)
Р2180=100 (задержка выдачи кода аварии при потере нагрузки, мс)
Р2800=1 (активация встроенного логического контроллера)
Р2801 in 000 =1 активация логического элемента AND1
in 009 =1 активация логического элемента NOT1
P2810 in 000=53:3 - вход логического элемента AND1(контрольный уровень тока)
in 001=2198:1 - вход логического элемента AND1 (контрольная частота №2)
P2828=2197:B (формирование аварии при потере нагрузки-выход логического элемента NOT1)
Примечание: Все значения частот и времени разгона-торможения справедливы только для расстояний между шунтами согласно паспортным данным и длине шунта точной остановки -20 см.